S4A es una modificación de Scratch que permite programar la plataforma de hardware libre Arduino de una forma sencilla. Proporciona bloques nuevos para tratar con sensores y actuadores connectados a una placa Arduino. También cuenta con un panel de sensores similar al de la PicoBoard.
La finalidad principal del proyecto es atraer a gente al mundo de la programación. Otro de sus objetivos es proporcionar una interfaz de alto nivel para programadores de Arduino con funcionalidades tales como la interacción con un conjunto de placas mediante eventos de usuario.
La interfaz
Un programa de S4A para controlar un Theremin de luz, con capacidad de grabación y reproducción
Los objetos Arduino proporcionan bloques para las funcionalidades básicas del micro-controlador, escrituras y lecturas digitales y analógicas, y otras funcionalidades de más alto nivel. También encontraréis bloques para tratar con motores estándar y servomotores de rotación contínua.
En S4A, una placa Arduino se representa con un tipo especial de sprite. El sprite Arduino encontrará automáticamente el puerto USB en qué se haya conectado la placa.
Pueden conectarse múltiples placas a la vez. Sólo es necesario añadir un nuevo sprite Arduino.
Especificaciones técnicas
Placas compatibles
S4A funciona correctamente con Arduino Diecimila, Duemilanove y Uno. No se ha probado con otras placas, pero es posible que también funcionen.
Conectividad
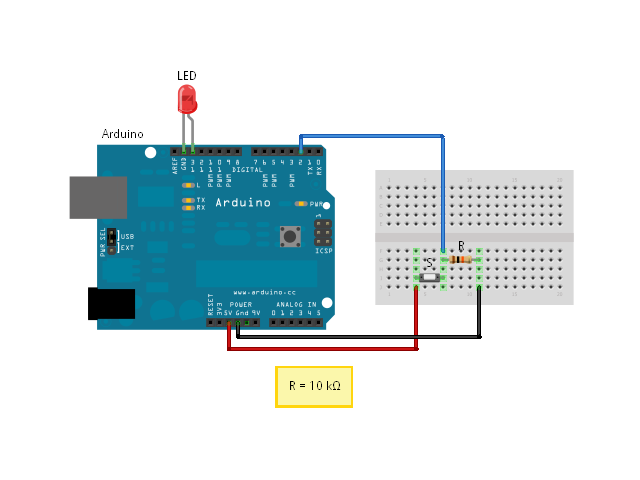
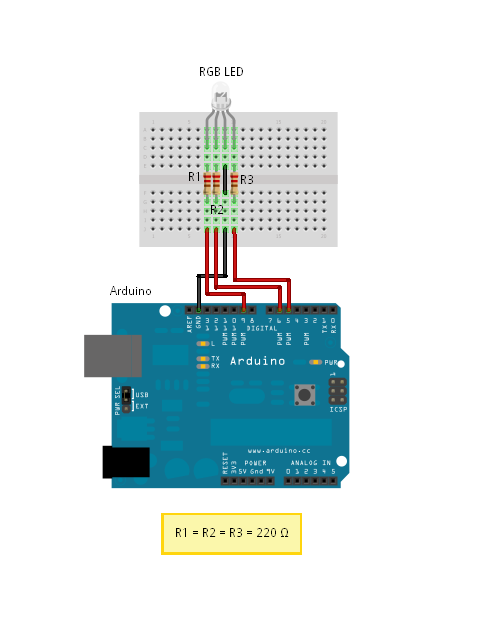
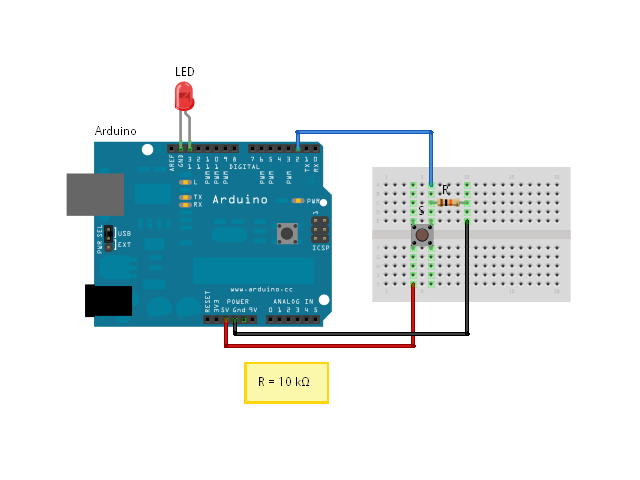
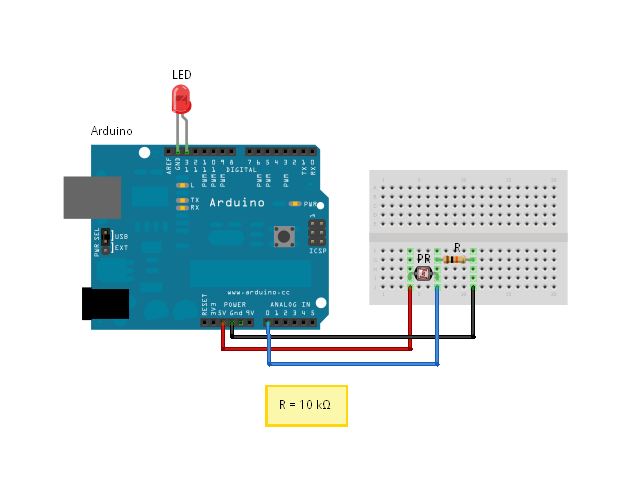
Los componentes deven conectarse de una forma determinada. S4A habilita 6 entradas analógicas (pines analógicos), 2 entradas digitales (pines digitales 2 y 3), 3 salidas analógicas (pines digitales 5, 6 y 9), 3 salidas digitales (pines 10, 11 i 13) y 4 salidas especiales para conectar servomotores de rotación contínua Parallax (pines digitales 4, 7, 8 y 12).
Es posible comunicarse inalámbricamente con una placa mediante un módulo de RF, como Xbee.
S4A permite controlar tantas placas como puertos USB tenga vuestro PC.
Compatibilidad
S4A es compatible con Scratch, de forma que es posible abrir proyectos de Scratch desde S4A. En cualquier caso, no es posible compartir proyectos de S4A en la web de la comunidad Scratch, ya que ésto violaría los términos y condiciones de uso de Scratch.
Téngase en cuenta que esta compatibilidad no es bidireccional. No es posible abrir proyectos de S4A desde el Scratch original.
S4A permite utilizar una PicoBoard conjuntamente con un Arduino.
Protocolo
S4A interactúa con Arduino enviando el estado de los actuadores y recibiendo el estado de los sensores cada 75 ms, por lo tanto el ancho del pulso tiene que ser mayor que éste período. El intercambio de datos sigui el protocolo PicoBoard, y necesita que se instale un programa específico (firmware) en la placa. Por favor, consultad la sección de Descargas para más instrucciones sobre la instalación.
Documentación y ejemplos
Aquí encontraréis toda la documentación, vídeos, ejemplos y ejercicios que hemos producido hasta la fecha.
Taller
Desde aquí podéis descargaros un zip con materiales y ejercicios completos para realizar un taller:
Aquí encontraréis una coleción de demos en catalán o castellano. Algunos de estos vídeos también han sido subtitulados al inglés.
Robot completo
Un robot con una cámara rotativa, sensores de distáncia y control remoto. Consta de dos placas arduino (para el control remoto y el robot), un módulo wireless XBee, tres sensores de infrarojos, un módulo de cámara y tres servomotores.
Introducción al taller de S4A
Este vídeo sirve como introducción para los talleres de S4A que se imparten en el Citilab. Encontraréis unos cuantos ejemplos de casos de uso de nuestro software.
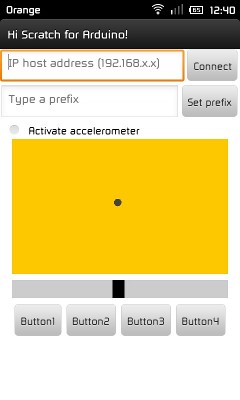
Hemos desarrollado una aplicación simple de Android que puede comunicarse con S4A via HTTP mediante el protocolo de sensores remotos de Scratch. Os lo podéis descargar desde aquí, o escaneando este código QR:
Para utilizarlo, seguid estas instrucciones:
En S4A, activad los sensores remotos (clic derecho en cualquier bloque de "Sensores")
En HiS4A (Android), introducid la IP local del PC en qué S4A esté funcionando (la podéis encontrar desde el menú Editar > Host de red), y continuación el prefjo (sólo necesario si os estáis conectando desde más de un cliente de Android)
Los botones se corresponden con mensajes, y el touchpad y deslizador a sensores remotos
¡IMPORTANTE! ¡Tanto S4A como HiS4A tienen que estar conectados a la misma red local!
API HTTP
La aplicación Android utiliza un protocolo muy sencillo que hemos desarrollado sobre el protocolo de mensajes HTTP de Scratch, la cual cosa permite interactuar con S4A desde un navegador o cualquier otra aplicación con acceso a la red.
En primer lugar, debe activarse la opción de sensores remotos en S4A (clic derecho en cualquier bloque de "Sensores").
Especificación de los mensajes
Enviar un mensaje: http://[IP]:42001/broadcast=[nombre-del-mensaje]
Enviar el valor de un sensor remoto (por ejemplo, el accelerómetro del cliente, la posición del puntero del ratón, etc): http://[IP]:42001/sensor-update=[nombre-del-sensor]=[valor]
Actualizar una variable de S4A: http://[IP]:42001/vars-update=[nombre-de-la-variable]=[valor]
Aplicación web de prueba
Para ver la API HTTP en funcionamento, podéis utilizar la aplicación web de prueba:
Las variables de S4A con nombres que empiecen con un signo más (ej. +nombreJugador) son visibles y modificables desde el cliente web
Las variables de S4A con nombres que empiecen con un signo menos (ej. -puntuacionJugador) sólo son visibles y modificables desde el cliente web
Las variables de S4A con nombres que no empiecen con los signos más o menos no son visibles desde el cliente web
Los mensajes de S4A con nombres que empiecen con un signo más (ej. +iniciarJuego) son visibles desde cliente web
Los mensajes de S4A con nombres que no empiecen con un signo más no son visibles desde el cliente web
Cambios
Versión 1.5
Arreglado bug de colisión entre objetos (Arduino y no Arduino)
Arreglado bug relacionado con un error persistente al parar y reanudar la conexión con la placa
Primitivas indexadas cambiadas a primitivas con nombre para una mejor compatibilidad con las nuevas máquinas virtuales de Squeak (gracias a Miriam Ruiz por el parche)
Cambiado el pin 12 de servo estándar a salida digital normal
Cambiado el pin por defecto de los bloques digital on/off de 13 a 10
Añadido bloque de reiniciar actuadores
Traducciones al catalán y castellano mejoradas
Versión 1.4
Añadida compatibilidad completa con el protocolo HTTP (POST y GET). Ahora es posible mandar mensajes a S4A y observar/modificar valores de variables desde un navegador web (entre otras cosas). Ver sección de Android.
Añadida opción para comprobar si hay actualizaciones disponibles desde el menú de ayuda. Ya no hace falta visitar la web para comprobarlo
El idioma se detecta automáticamente al arrancar por primera vez (cuando el archivo Scratch.ini no existe). También se guarda en este mismo archivo al cambiarse desde el menú de idioma
El puerto serie en qué se conecta una placa se abre correctamente al arrancar S4A
Arreglado bug de la versión para Windows, en qué la barra de título no mostraba el nombre y la versión de S4A
Versión 1.3
Arreglada la compatibilidad con Arduino UNO en Linux (gracias a Jorge Gómez). Es imprescindible cargar el nuevo firmware, así como actualizar el bootloader en determinadas placas
Cambiados los nombres del panel de sensores y sus correspondientes bloques de Arduino para mostrar números de pin reales
Añadidos comandos de servidor en el menú "Editar" para trabajar con comunicación en red sobre sockets
Añadida compatibilidad para aplicaciones Android (HiS4A)
Traducciones al catalán y castellano mejoradas
Muchos bug arreglados
Descarga e instalación
Para instalar S4A, hay que instalar software tanto en el PC como en la placa Arduino. Aquí encontraréis los pasos detallados para poner S4A en marcha.
Instalar S4A en el ordenador
S4A funciona sobre los tres sistemas operativos de escritorio más populares. Descargad e instalad el que os convenga.
Este firmware es un programa que debe instalarse en vuestra placa Arduino para poderos comunicar con ella desde S4A.
Descargad e instalad el entorno Arduino siguiendo las instrucciones de http://arduino.cc/en/Main/Software. Hay que tener en cuenta que, para trabajar con Arduino Uno, se necesita la versión 0022 o superior.
Como Scratch es, en realidad, una imagen de Squeak Smalltalk, todo su código viene incluido en la versión final. Para acceder a él, pulsad mayúsculas + clic izquierdo sobre el menú "Archivo" de S4A, y seleccionad "Salir del modo de usuario". Os encontraréis delante de el entorno clásico de una imagen de Squeak 2.8, y tendréis acceso a un Browser, Workspace y todas las herramientas a qué estáis acostumbrados.
De todas formas, a la versión final de S4A hay código que ha sido compilado, y se habrán perdido varios nombres de variables y argumentos de mensajes. Por este motivo, también distribuimos una imagen con el código fuente limpio para desarrolladores, descargable desde este enlace:
S4A funciona correctamente con Arduino Diecimila, Duemilanove y Uno. No se ha probado con otras placas, pero es posible que también funcionen.
¿Funcionará S4A en mi ordenador?
S4A funciona sobre los tres sistemas operativos de escritorio más populares: Microsoft Windows, GNU/Linux and MacOS. Así que, muy probablemente, funcionará en vuestro ordenador.
El equipo
S4A ha sido desarrollado en el Citilab por el equivo de investigación Edutech, con la ayuda del grupo de programación Smalltalk.cat y de colaboradores como Jorge Gómez, jefe del proyecto de educación en software y hardware a Miscela
Marina Conde
Marina Conde se diplomó en Ingeniería Técnica en Informática de Gestión por la Universitat Politècnica de Catalunya (UPC) en el año 2009, donde continuó los estudios hasta obtener, en 2012, el título de Ingeniería Superior en Informática.
Mientras trabajaba en Citilab, desarrolló su primer proyecto final, que consistió en crear un entorno para trabajar con placas Arduino desde el entorno de Smalltalk Pharo. Más adelante, utilizó este proyecto como base sobre la cual se programó S4A.
Víctor Casado
Víctor empezó a estudiar Ingeniería en Informática en la Universitat Autònoma de Barcelona (UAB), pero al cabo de dos años pasó a estudiar el grado de telecomunicaciones en la Escola Politècnica Superior de Castelldefels.
Durante este tiempo, le surgió la oportunidad de entrar al Citilab a través de una beca, donde desarrolló S4A, su proyecto final.
Joan Güell
Joan es un biólogo que, en sus primeros años, trabajó en el campo de la ecología. La necesidad de analizar la información generada y los datos recogidos instigó su aproximación a la informática. Se inscribió a su primer curse de programación en el año 1975, cuando los ordenadores todavía se programaban usando tarjetas perforadas.
Su principal tarea en el Citilab ha estado relacionada con el campo de la formación en dos áreas: la enseñanza de la programación mediante Scratch, especialmente para niños, y la formación en conocimientos de informática a ciudadanos adultos.
Jose García
Jose estudió Inginiería Superior en Telecomunicaciones, pero empezó a trabajar en una editorial andes de terminar los estudios. Durante el tiempo en qué trabajó en esta empresa, programó una amplia variedad de aplicaciones.
En el Citilab, descubrió Scratch y Smalltalk, retomando parte de su trabajo como programador. Más adelante, se unió a varios proyectos con el objetivo de establecer una relación más cercana entre los usuarios y la programación. Acualmente, es el responsable del equipo de investigación en educación tecnológica Edutec.
Bernat Romagosa
En el año 2009, Bernat se graduó como Ingeniero Técnico en Informática de Gestión por la Universitat Oberta de Catalunya (UOC). Aprendió Smalltalk en un curso impartido pir Jordi Delgado en el Citilab durante el año 2008, donde más adelante entró a trabajar con el objetivo de desarrollar una escuela virtual de programación.
Desde entonces, ha estado involucrado en varios proyectos de programación en el Citilab. Entre otros, un sistema de gestión del conocimiento y varias aplicaciones educativas.
Jordi Delgado
Jordi es profesor titular en el departamento de Lenguajes y Sistemas Informáticos de la Universitat Politècnica de Catalunya (UPC). Pertenece al grupo de investigación LARCA e imparte clases en la Facultat d'Informàtica de Barcelona.
Invierte la mayor parte de su tiempo en divulgar, difundir la idea y programar en Smalltalk, un lenguaje de programación apassionante que considera que todo el mundo debería usar. Es miembro de la mesa de la European Smalltalk Users Group (ESUG) y presidente de la associación Smalltalk.cat.
Comunidad
Para formular preguntas y respuestas, por favor utilitzad la lista de correo de la comunidad. Para suscribiros, enviad un correo a:

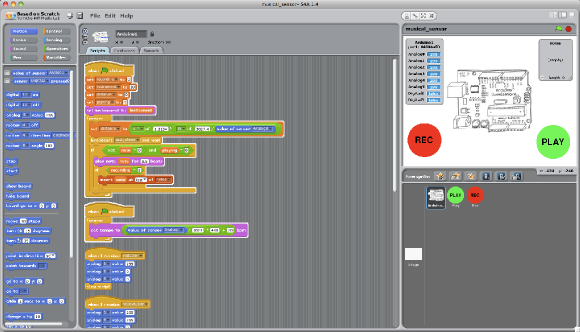 Un programa de S4A para controlar un Theremin de luz, con capacidad de grabación y reproducción
Un programa de S4A para controlar un Theremin de luz, con capacidad de grabación y reproducción